
研究所简介
科研团队
总体定位及方向
科研成果
机器人应用技术中心
1、研究所简介
机器人应用技术中心依托华中科技大学数字制造装备与技术国家重点实验室、上海交通大学机器人研究所等科研机构,跟踪国际先进机器人技术研究成果,开展航空、航天、汽车、新能源、光伏领域的机器人应用技术研究,开发出的飞机蒙皮铣削加工机器人、大行程非接触测量机器人、视觉导引机器人在国内外处于领先地位,可以为航空、航天、汽车、新能源等高端制造企业提供机器人加工系统总体解决方案和机器人智能加工装备,提供机器人加工、机器视觉检测、机器人标定、大行程非接触式测量等机器人应用技术研发与服务。
2、承担项目
|
项目名称 |
主管部门或合作企业 |
|
大型复杂零件机器人加工理论与技术 |
国家自然科学基金委 |
|
航空复杂零件智能加工装备 |
数字制造装备与技术国家重点实验室 |
|
大型航空结构件多机器人协同铣削加工技术研究 |
国家博士后基金委 |
|
压铸岛取件喷涂机器人 |
广州创腾自动化设备有限公司 |
|
视觉导引硅锭搬运机器人及检测生产线 |
江阴海润光伏科技股份有限公司 |
|
|
|
|
|
|
3、合作单位


4、专利列表及相关证书
5、联系方式
华中科技大学无锡研究院 机器人应用技术中心
无锡市惠山经济开发区堰新路329号
联系人:张刚 博士
联系电话:18168902856
电子邮箱:zgrobot@163.com
机器人应用技术中心已建立了一支具有良好知识和年龄结构的队伍,包括博士4人,工程师8人以及博士生2人、硕士生4人。
主要骨干成员:
主要研究方向:
l 机器人智能加工的在线测量-加工工艺-加工装备一体化技术;
l 基于六维激光跟踪仪的机器人标定技术;
l 大行程非接触式激光跟踪测量技术;
l 基于2D、3D视觉的物料分拣与视觉导引机器人技术。
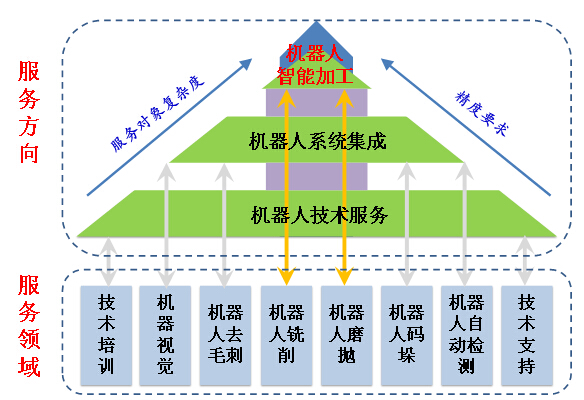
图1 机器人应用技术中心服务方向与技术领域
核心技术与应用:
l 机器人铣削加工的测量-工艺-装备一体化技术涉及大行程非接触式激光在线测量、机器人几何参数标定、基于机器人加工动力学的铣削工艺参数优化和机器人智能加工装备系统集成等若干项关键技术,面向国防、航空、航天等领域,研制机器人铣削加工装备,促进行业技术升级,相关技术及产品已在国防及民用领域应用;
l 基于六维激光跟踪仪、Spatial Analyzer测量数据分析软件,机器人应用技术中心拥有机器人标定核心技术,可在用户现场开展ABB、KUKA、FANUC等品牌工业机器人标定技术服务,也可对用户自行研制的工业机器人进行精度检定与校准方面的技术支持与现场服务;
l 将六维激光扫描仪、3D点云匹配与机器人技术相结合,机器人应用技术中心可为用户提供大行程非接触式激光检测装备以及大行程非接触测量、逆向工程方面的技术支持与服务;
l 机器人技术中心将2D、3D机器视觉识别技术与机器人技术相结合,针对杂乱无章的随机工件,由机器视觉识别工件坐标,实现物料快速识别与机器人定向抓取,替代人工分拣,实现机床上下料及随机物料搬运的自动化与机器人化。
代表性成果:
(1)机器人铣削加工的在线测量-加工工艺-加工装备一体化技术
基于国家自然科学基金重大项目“复杂零件机器人加工理论与技术”的研究成果,针对大型航空薄壁结构件镜像铣削,多机器人的“随动支撑-在位测量-自适应加工”存在并行协调、同步控制等难题,将机器人技术与数控加工技术相结合,研制大型复杂航空结构件的机器人铣削加工装备,实现大型复杂航空结构件的在线测量、加工工艺优化与加工装备一体化。
机器人技术中心目前拥有铣削加工机器人、六维激光跟踪仪、激光扫描仪、机器人线性导轨、机器人铣削主轴、机器人对刀仪、机器人离线编程软件等先进机器人铣削加工硬件及软件,可为用户提供多机器人协同铣削加工的动力学建模-随动支撑-补偿控制一体化系统解决方案,机器人铣削加工相关研究成果已在国内某航空企业的复合材料蒙皮机器人铣削加工中得到推广应用。
2015年5月,机器人应用技术中心与德国弗劳恩霍夫制造技术与应用材料研究所(Fraunhofer IFAM)签定技术交流与合作协议,共同致力于机器人加工技术在中国航空领域的应用研究与技术推广。
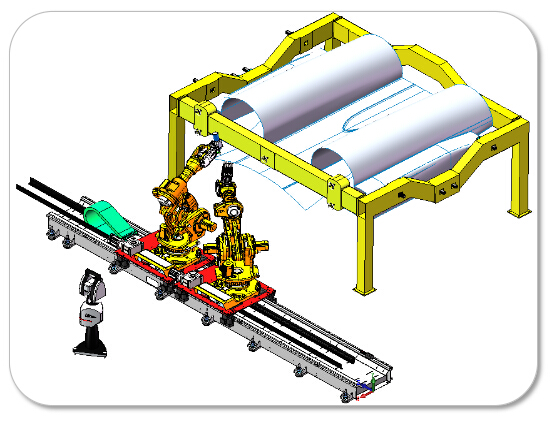
图2大型航空结构件多机器人协同铣削加工装备
(2)基于六维激光跟踪仪的工业机器人标定与校准技术
机器人应用技术中心拥有Leica AT960六维激光跟踪仪、Spatial Analyzer测量数据分析软件以及工业机器人标定校准软件,可区分及补充不同工业机器人模型,识别和补偿不同机器人基座系统、工具位置,对工业机器人的不同负载、由弹力造成的重心偏移进行补偿,并对工业机器人的轨迹进行分析和精确定位反馈控制。
机器人应用技术中心可在用户现场开展ABB、KUKA、FANUC等品牌工业机器人标定技术服务,开展机器人位姿准确度,位姿重复性,多方向位姿准确度变动,距离准确度,距离重复性,位置稳定时间,轨迹准确度,轨迹重复性,机器人速度准确度,速度重复性速度波动,振幅和频率等机器人性能分析和评价,也可对用户自行研制的工业机器人进行精度检定与校准方面的技术支持与现场服务。

图3基于六维激光跟踪仪的工业机器人参数标定
(3)基于六维激光扫描仪的大型工件非接触式测量技术
机器人应用技术中心将六维激光扫描技术与机器人技术相结合,可在复杂的现场和空间对被测大型工件进行快速扫描测量,直接获得激光点所接触的物体表面的三维坐标、色彩信息和反射强度——点云数据,点云数据经过计算机处理后,结和CAD 可快速重构出被测物体的三维模型及线、面体、空间等各种制图数据。
机器人应用技术中心可根据客户的需求,提供大行程非接触式激光检测装备以及大行程非接触激光测量、逆向工程方面的技术支持与服务。
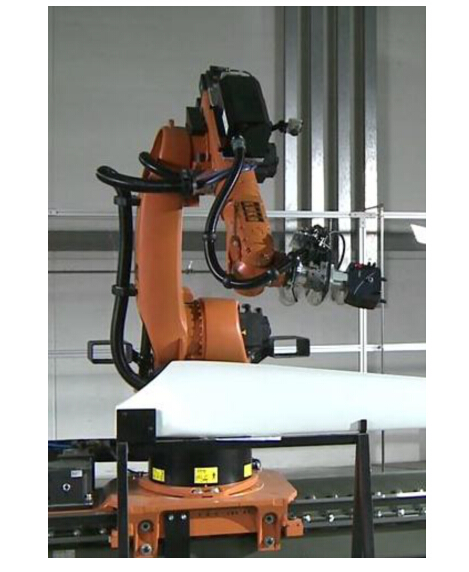
图4 大型工件非接触式激光扫描装备
(4)基于2D、3D视觉的物料定位与识别及分拣机器人技术
面向太阳能光伏行业,将机器人技术与机器视觉技术相结合,采用机器视觉检测实现随机摆放硅锭的精确视觉定位与类型识别,由六轴工业机器人取代传统人工搬运,实现硅锭的搬运、少子工位上下料和自动码垛,为客户提供工业机器人与机器视觉相结合的视觉导引硅锭搬运机器人及粗检、精检生产系统整套解决方案。
基于视觉导引的硅锭搬运机器人的主要技术参数及配置清单:
|
主要配置 |
||
|
序号 |
名称 |
性能参数 |
|
1 |
工业机器人 |
六轴、200Kg负载、可达区域:半径2米 |
|
2 |
视觉系统 |
美国邦纳/美国康纳视Cognex(可选) |
|
3 |
控制系统 |
西门子PLC及人机接口HMI |
|
4 |
气动系统 |
SMC气动 /FESTO气动(可选) |
|
性能参数 |
||
|
1 |
搬运效率 |
25分钟一个大锭,36个小锭的视觉识别与上下料 |

图4 视觉导引硅锭搬运机器人
视觉导引机器人技术相关的专利成果:
(1) 硅锭自动粗检生产线,申请号: 201510207503.0
(2) 硅锭自动精检生产线,申请号: 201510207553.9
(3) 轮毂五轴搬运机器人及夹持机械手,申请号: 201410745341.1
相关实用新型专利:
(1) 硅锭自动粗检生产线,授权号: ZL201510207503.0
(2) 硅锭自动精检生产线,授权号: ZL201520264158.X
(5)压铸岛取件喷涂机器人
基于现场总线的压铸机与取件机器人、喷涂机器人实时数据通讯技术,实现压铸机与取件喷涂机器人的无缝集成,可根据不同压铸机生产线的技术要求,通过更换不同规格取件机械手、喷涂宝塔头,实现不同压铸机快捷、灵活、准确的的取件、喷涂作业,提高压铸机的自动化与机器人化水平,减轻劳动强度,节约人力成本。
基于现场总线的压铸岛取件喷涂机器人的主要技术参数及配置清单:
|
主要配置 |
||
|
序号 |
名称 |
性能参数 |
|
1 |
取件机器人 |
六轴、160Kg负载、可达区域:半径2.1米 |
|
2 |
喷涂机器人 |
六轴、100Kg负载 |
|
3 |
控制系统 |
西门子PLC及人机接口HMI |
|
4 |
气动系统 |
FESTO气动 |
|
5 |
通讯方式 |
Profibus现场总线通讯 |
|
性能参数 |
||
|
1 |
生产效率 |
3分钟完成汽车发动机压铸件的取料、喷涂作业 |
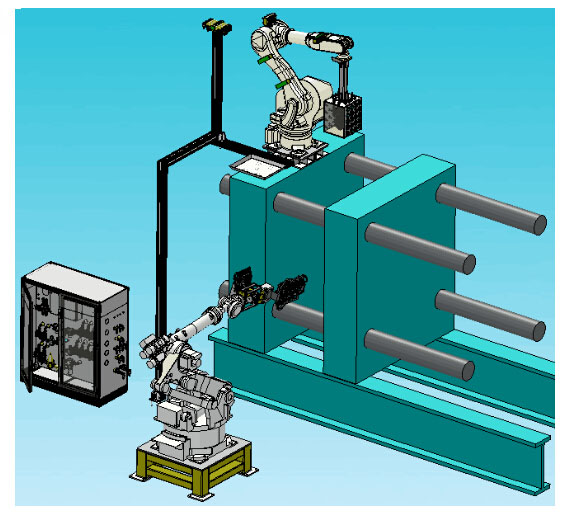
图5 取件喷涂机器人生产系统